Abstract
State Space models (SSMs) like PointMamba provide efficient feature extraction for point cloud self-supervised learning with linear complexity, surpassing Transformers in computational efficiency. However, existing PointMamba-based methods rely on complex token ordering and random masking, disrupting spatial continuity and local semantic correlations. We propose ZigzagPointMamba to address these challenges. The key to our approach is a simple zigzag scan path that globally sequences point cloud tokens, enhancing spatial continuity by preserving the proximity of spatially adjacent point tokens. Yet, random masking impairs local semantic modeling in self-supervised learning. To overcome this, we introduce a Semantic-Siamese Masking Strategy (SMS), which masks semantically similar tokens to facilitate reconstruction by integrating local features of original and similar tokens, thus overcoming dependence on isolated local features and enabling robust global semantic modeling. Our pre-training ZigzagPointMamba weights significantly boost downstream tasks, achieving a 1.59% mIoU gain on ShapeNetPart for part segmentation, a 0.4% higher accuracy on ModelNet40 for classification, and 0.19%, 1.22%, and 0.72% higher accuracies respectively for the classification tasks on the OBJ-BG, OBJ-ONLY, and PB-T50-RS subsets of ScanObjectNN.
Method Overview and Results
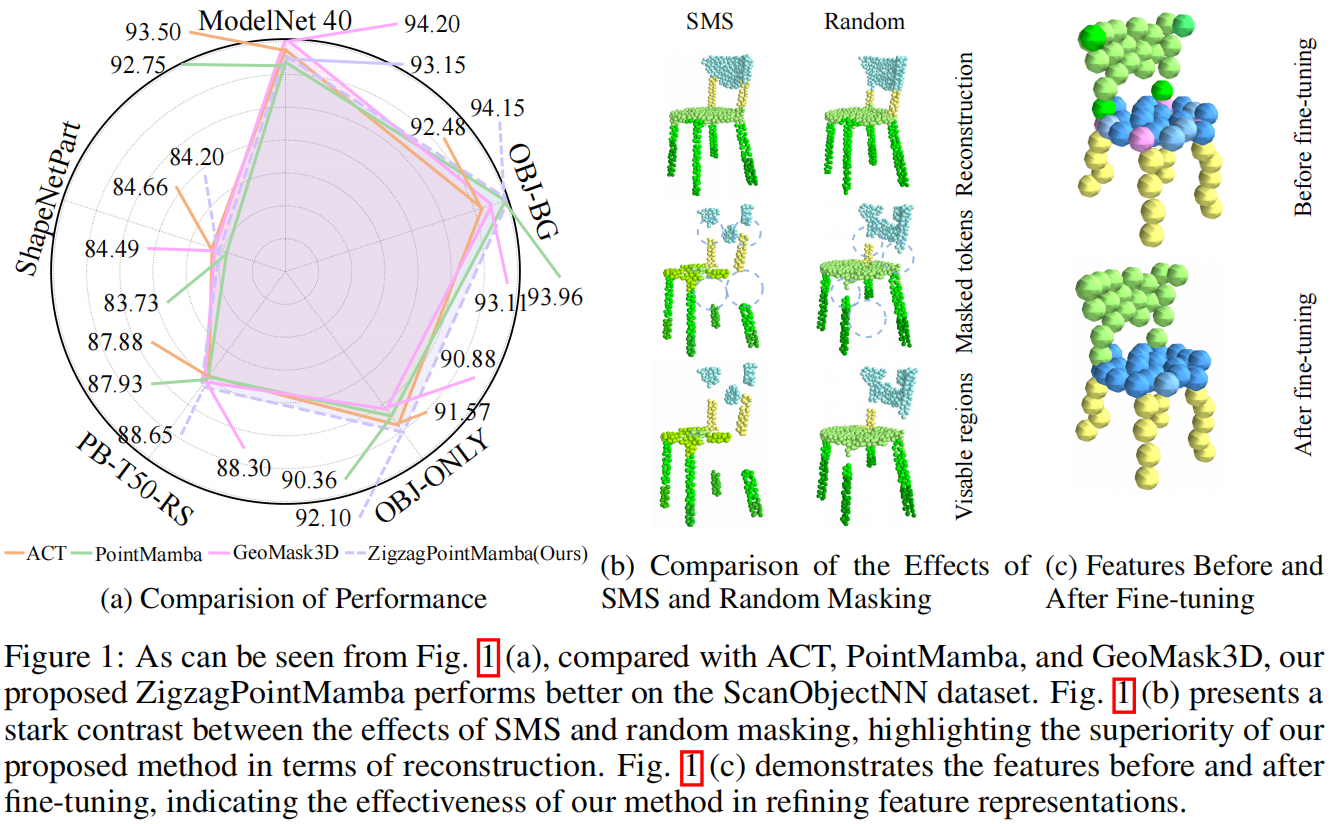
Comprehensive Results: (a) Performance comparison across datasets, (b) SMS vs. random masking reconstruction quality, (c) Feature representations before and after fine-tuning.
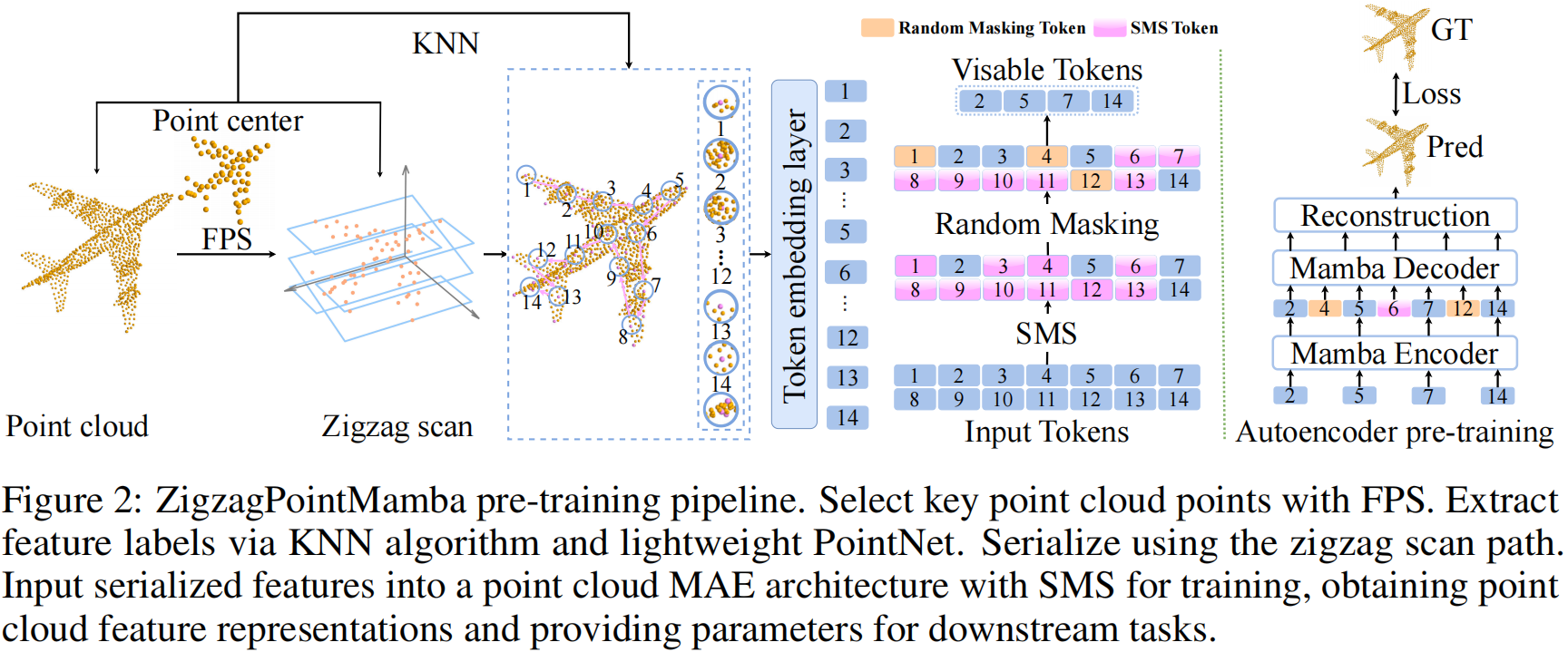
Pipeline Overview: ZigzagPointMamba pre-training with zigzag scan path and Semantic-Siamese Masking Strategy.
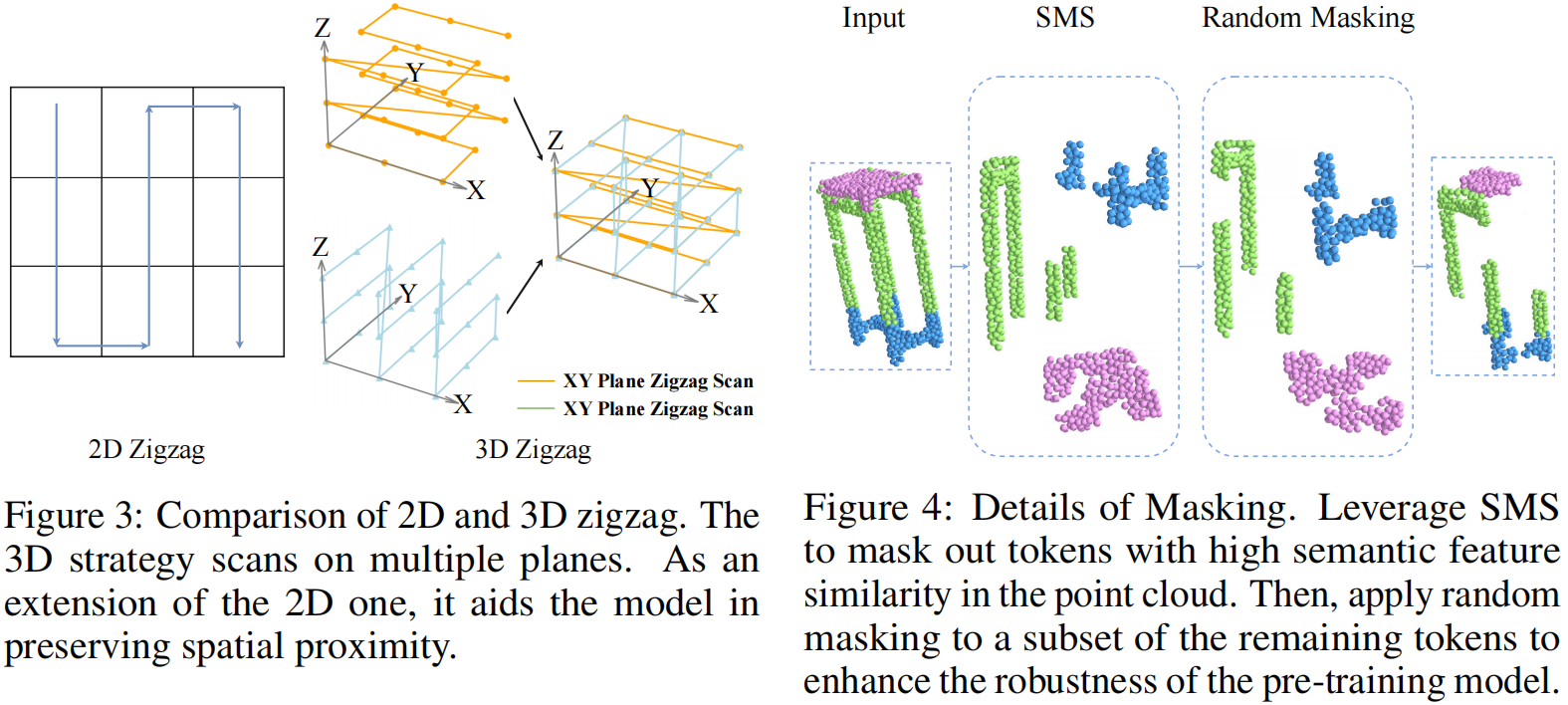
Zigzag Scan Path: 3D extension preserving spatial proximity while SMS masks semantically similar tokens.
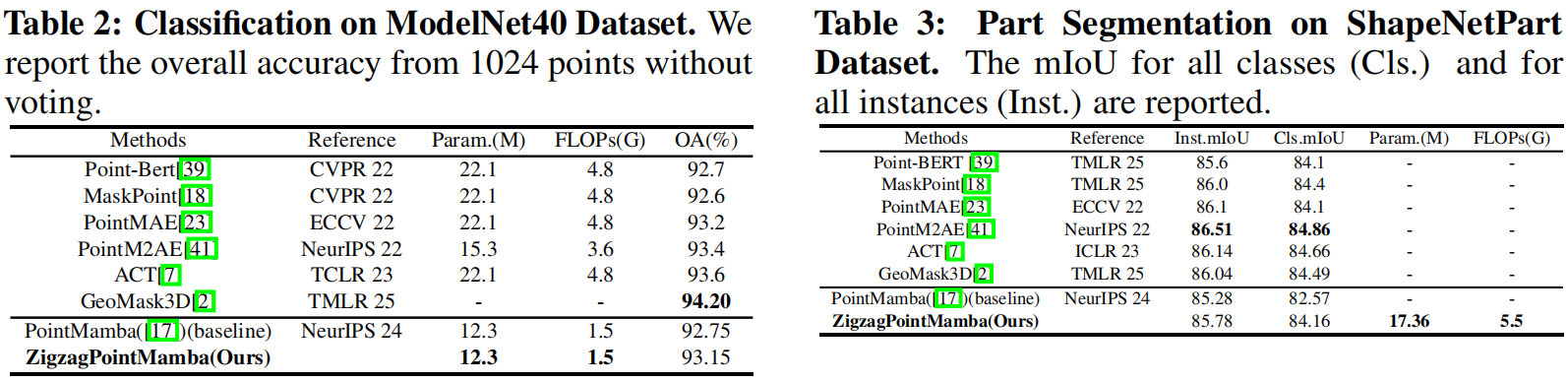
Experimental Results: Classification on ModelNet40 and part segmentation on ShapeNet Part datasets.
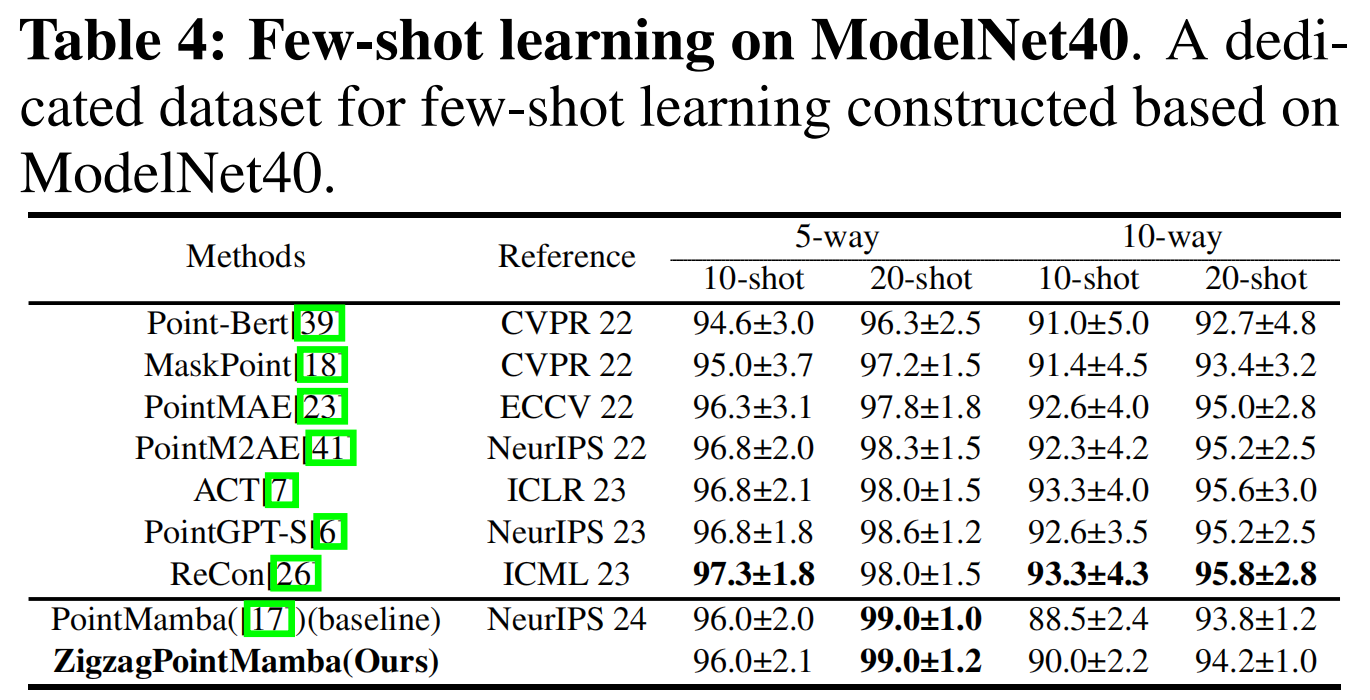
Few-shot Learning: Superior performance on ModelNet40 few-shot classification tasks.
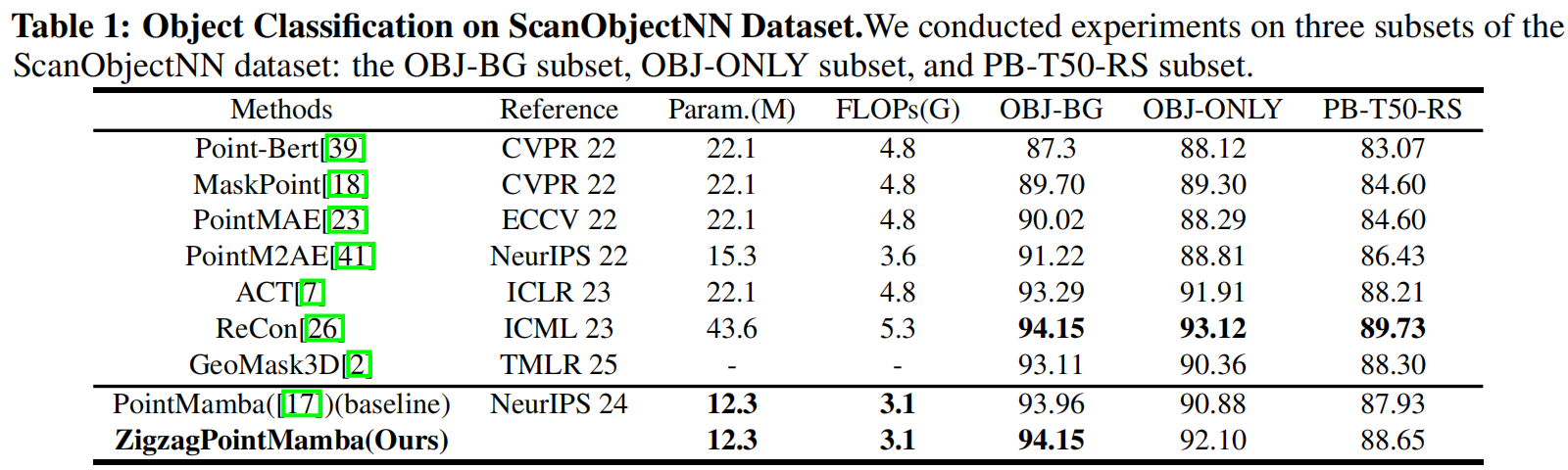
ScanObjectNN Results: Consistent improvements across OBJ-BG, OBJ-ONLY, and PB-T50-RS subsets.
Poster
Additional Qualitative Results
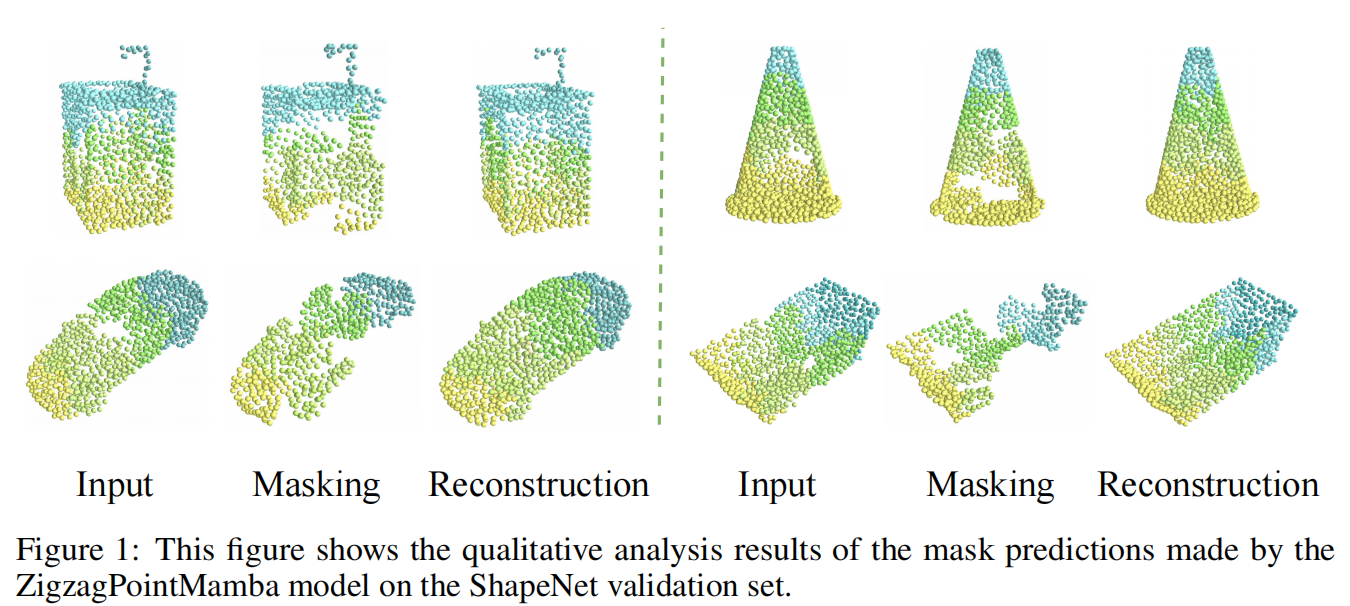
Reconstruction Quality Analysis
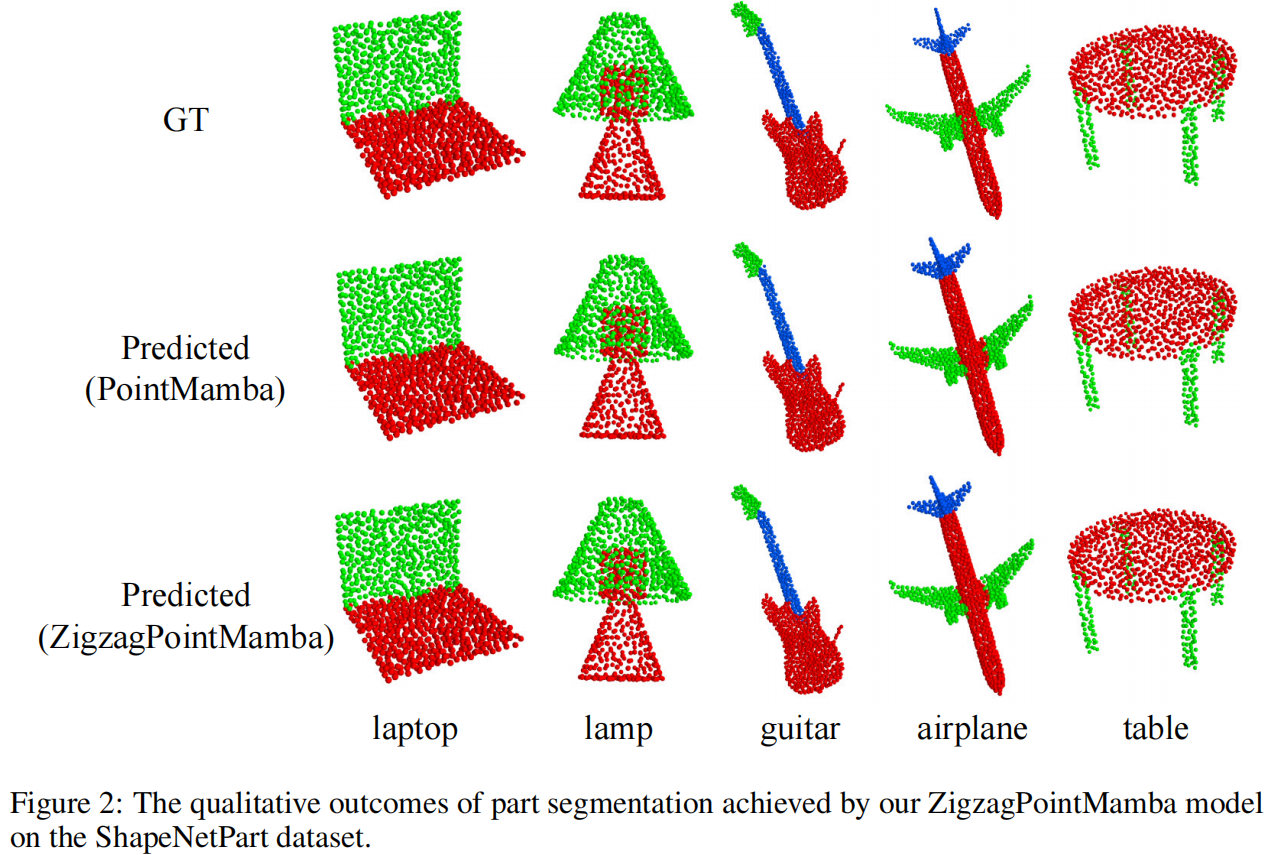
Part Segmentation Comparison
BibTeX
@inproceedings{diao2025zigzagpointmamba,
title={ZigzagPointMamba: Spatial-Semantic Mamba for Point Cloud Understanding},
author={Diao, Linshuang and Song, Sensen and Qian, Yurong and Ren, Dayong},
booktitle={Advances in neural information processing systems},
year={2025}
}